
Machine Perception
Intelligent perception is crucial for versatile robots. The integration of advanced proprioceptive and exteroceptive sensing systems are able to provide comprehensive feedback, enabling the robots to navigate, interact, and resolve challenges in real time within complex and unstructured settings.
Read More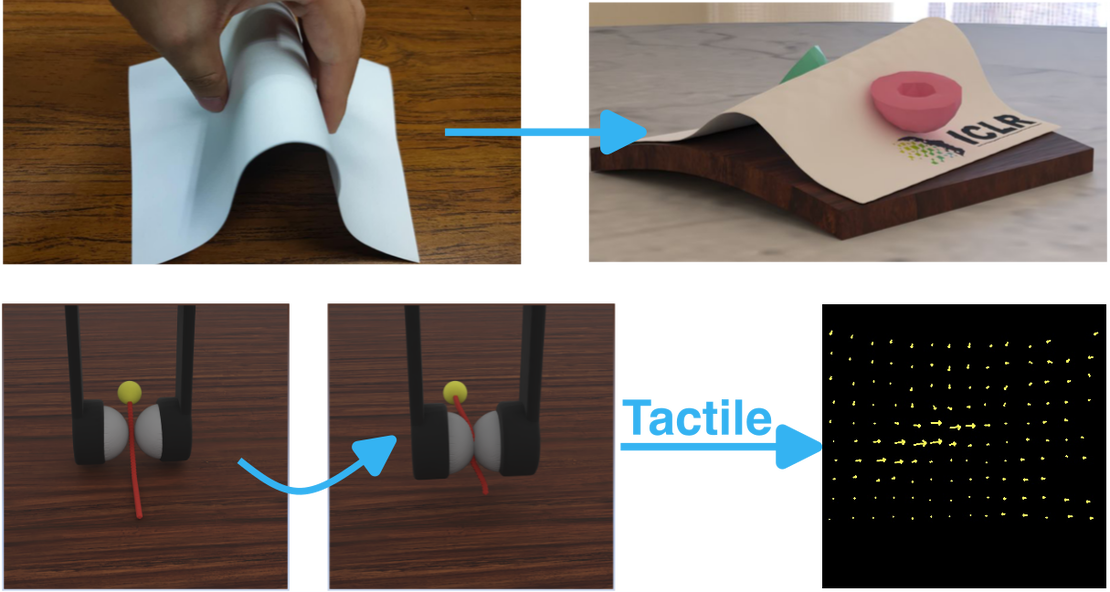
Soft Material Modeling and Manipulation
Learning control strategies to manipulate soft materials (e.g., cables, papers) is challenging and the behaviors of soft materials under contact are difficult to model. Collaborating with MIT-IBM Watson AI Lab, we presented a fully differentiable simulation platform for thin-shell object manipulation tasks (e.g., papers) and a differentiable simulation environment for vision-based tactile sensors (e.g., GelSight) for learning robotic skills efficiently in simulation.
Read More