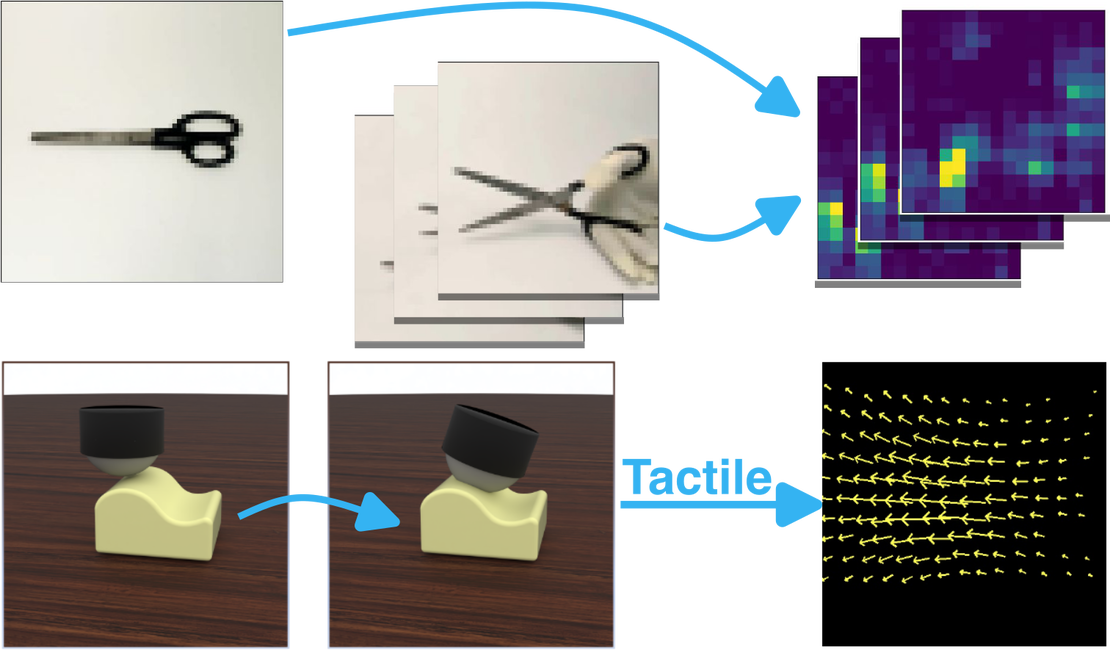
Tactile Sensing and Contact Modeling
Tactile perception and contact modeling are crucial for successful manipulation tasks, as they enable robots to understand and interact with their environment through touch. By sensing tactile information, robots can perceive object properties, detect contacts, and adjust their grasp and movement accordingly. This integration of tactile sensing and visual observation enhances robot dexterity, stability, and overall performance in contact-rich manipulation scenarios.
Read More
Machine Perception
Intelligent perception is crucial for versatile robots. The integration of advanced proprioceptive and exteroceptive sensing systems are able to provide comprehensive feedback, enabling the robots to navigate, interact, and resolve challenges in real time within complex and unstructured settings.
Read More