Robotic Manipulation
- Chao Liu
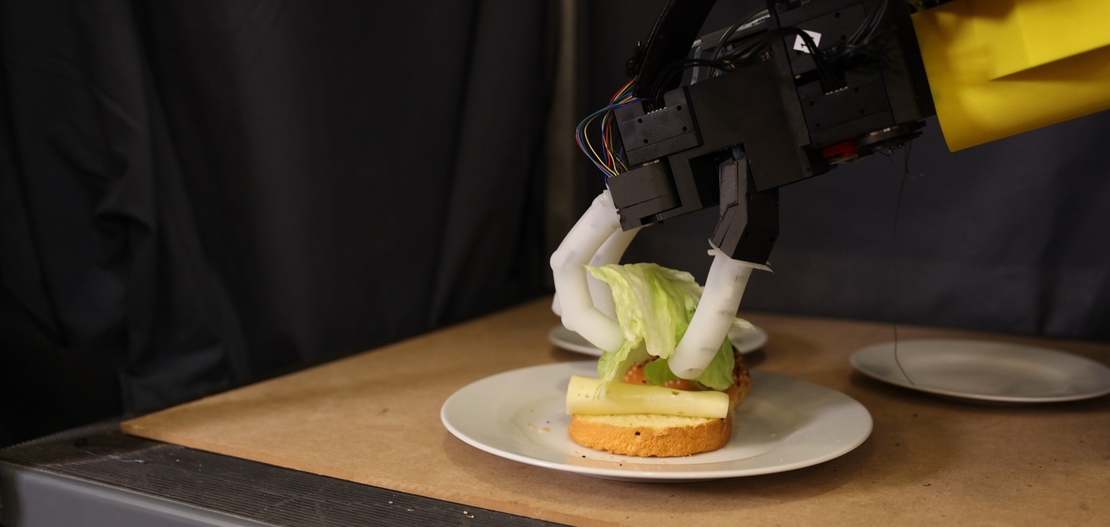
- Robotic hand
- September 27, 2023
Our research aims to advance robotic manipulation capabilities through the development of innovative robotic hands and a comprehensive multimodal data collection platform. We have designed and fabricated two novel robotic hands: a direct 3D-printed soft robotic hand for delicate grasping, and a soft-rigid hybrid dexterous robotic hand that combines flexibility and precision. We have also established a multimodal data collection environment equipped with wearable sensors and cameras, allowing us to capture and integrate diverse sensory inputs and visual data of human behaviors. This integrated setup enables us to explore complex manipulation tasks, develop sophisticated control algorithms, and push the boundaries of robotic dexterity and autonomy.