
Chao Liu
Principal Investigator
Education
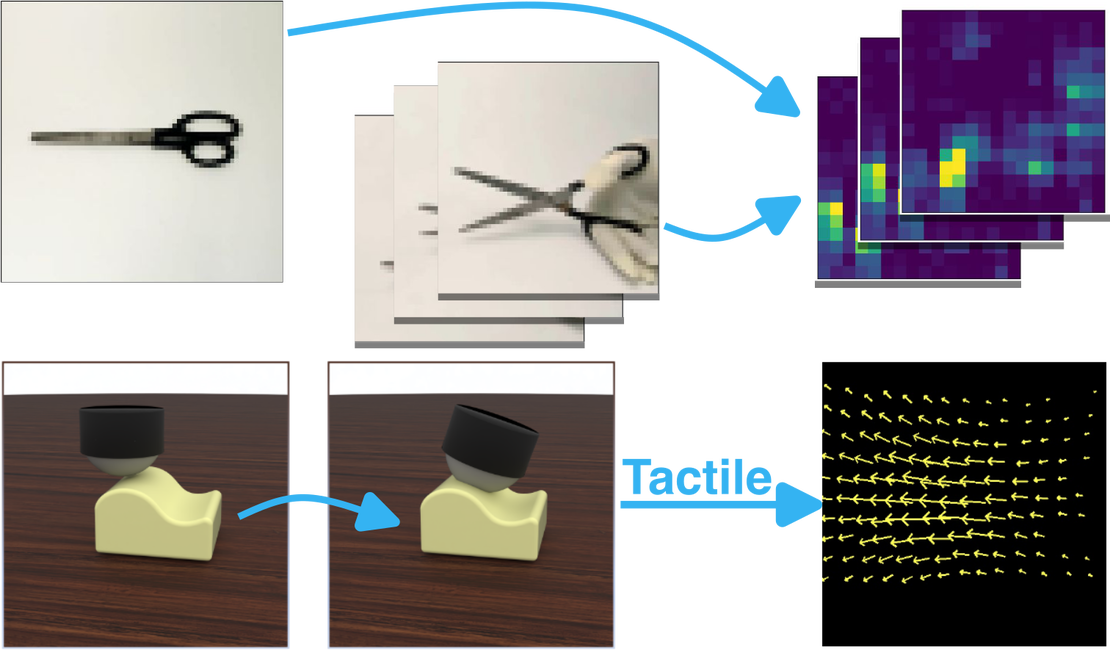
Tactile Sensing and Contact Modeling
Tactile perception and contact modeling are crucial for successful manipulation tasks, as they enable robots to understand and interact with their environment through touch. By sensing tactile information, robots can perceive object properties, detect contacts, and adjust their grasp and movement accordingly. This integration of tactile sensing and visual observation enhances robot dexterity, stability, and overall performance in contact-rich manipulation scenarios.
Read More
Opportunities at PRIME
PRIME Robotics Lab The PRIME (Perceptive Reasoning and Intelligent MachinEry) Robotics Lab at UBC conducts cutting-edge robotics research at the intersection of robotics, perception, and artificial intelligence. Our vision is to develop innovative robotic systems that can interact with and adapt to their environment in a seamless and intelligent manner. We aim to push the boundaries of what is possible in robotics, enabling robots to operate effectively in complex and dynamic environments.
Read More
Machine Perception
Intelligent perception is crucial for versatile robots. The integration of advanced proprioceptive and exteroceptive sensing systems are able to provide comprehensive feedback, enabling the robots to navigate, interact, and resolve challenges in real time within complex and unstructured settings.
Read More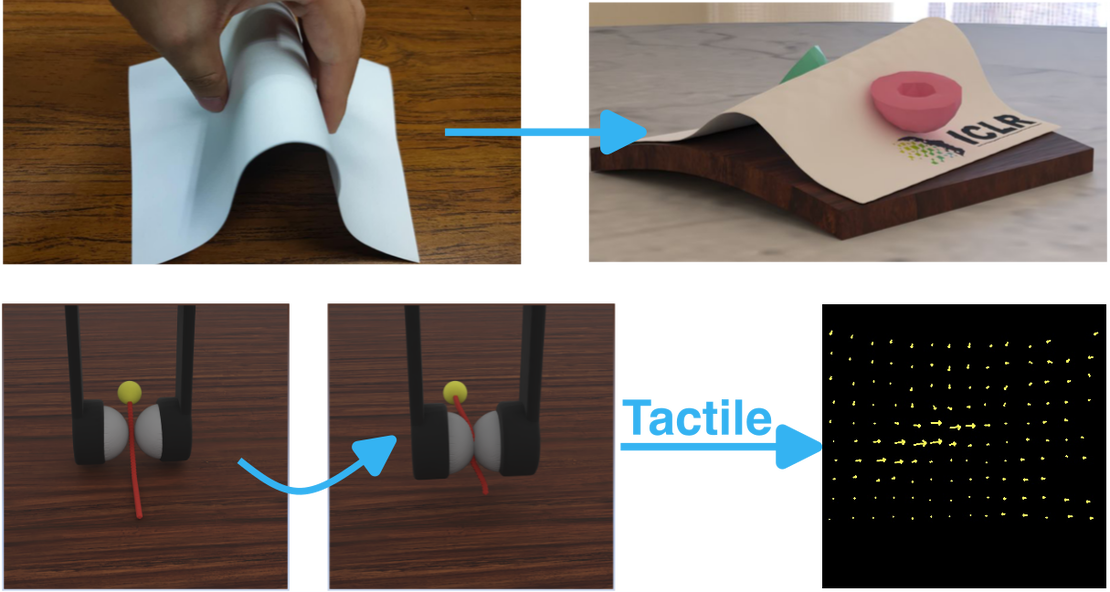
Soft Material Modeling and Manipulation
Learning control strategies to manipulate soft materials (e.g., cables, papers) is challenging and the behaviors of soft materials under contact are difficult to model. Collaborating with MIT-IBM Watson AI Lab, we presented a fully differentiable simulation platform for thin-shell object manipulation tasks (e.g., papers) and a differentiable simulation environment for vision-based tactile sensors (e.g., GelSight) for learning robotic skills efficiently in simulation.
Read More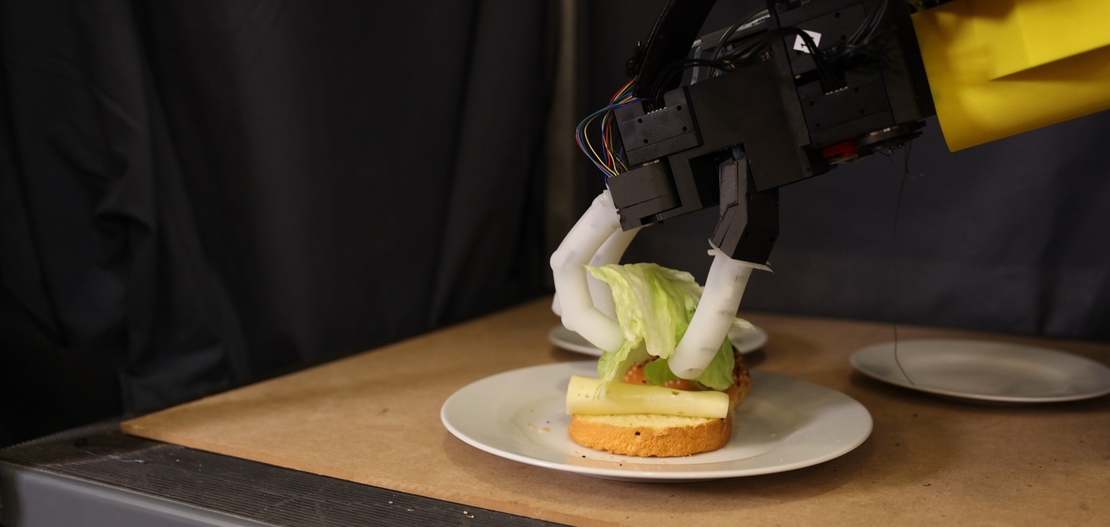
Robotic Manipulation
Our research aims to advance robotic manipulation capabilities through the development of innovative robotic hands and a comprehensive multimodal data collection platform. We have designed and fabricated two novel robotic hands: a direct 3D-printed soft robotic hand for delicate grasping, and a soft-rigid hybrid dexterous robotic hand that combines flexibility and precision. We have also established a multimodal data collection environment equipped with wearable sensors and cameras, allowing us to capture and integrate diverse sensory inputs and visual data of human behaviors. This integrated setup enables us to explore complex manipulation tasks, develop sophisticated control algorithms, and push the boundaries of robotic dexterity and autonomy.
Read More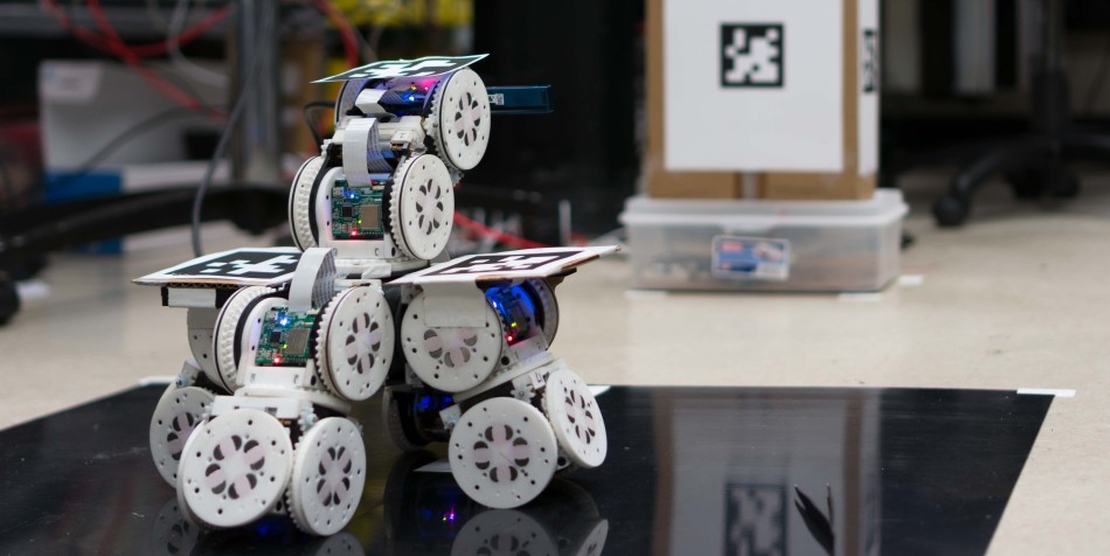
SMORES-EP
SMORES-EP is a swarm and modular robotic system designed and built at the University of Pennsylvania, and used by researchers at Penn and Cornell. SMORES stands for Self-Assembling MOdular Robot for Extreme Shapeshifting, and EP refers to the Electro-Permanent magnets the modules use to connect. The SMORES-EP robotic system was developed by Dr. Tarik Tosun and Dr. Chao Liu at the University of Pennsylvania supervised by Dr. Mark Yim.
Read More
Variable Topology Truss
Variable Topology Trusses (VTT) are hyper-redundant parallel robots. A VTT consists of linear actuators for the truss members, which are joined at the truss nodes by a special reconfigurable spherical joint. A VTT can significantly change its shape and size, reconfigure by merging and splitting these truss nodes, and execute rolling locomotion. The core component is the novel linear actuator called Spiral Zipper. The VTT robotic system was developed by Dr. Alexander Spinos, Dr. Devin Carroll, Dr. Andrew Bae, and Dr. Chao Liu at the University of Pennsylvania supervised by Dr. Mark Yim.
Read More